# Path to the PEM encoded server certificate.
# Path to the PEM encoded keyfile.
由於使用的 Nodemcu V2 本身有 Wifi 功能
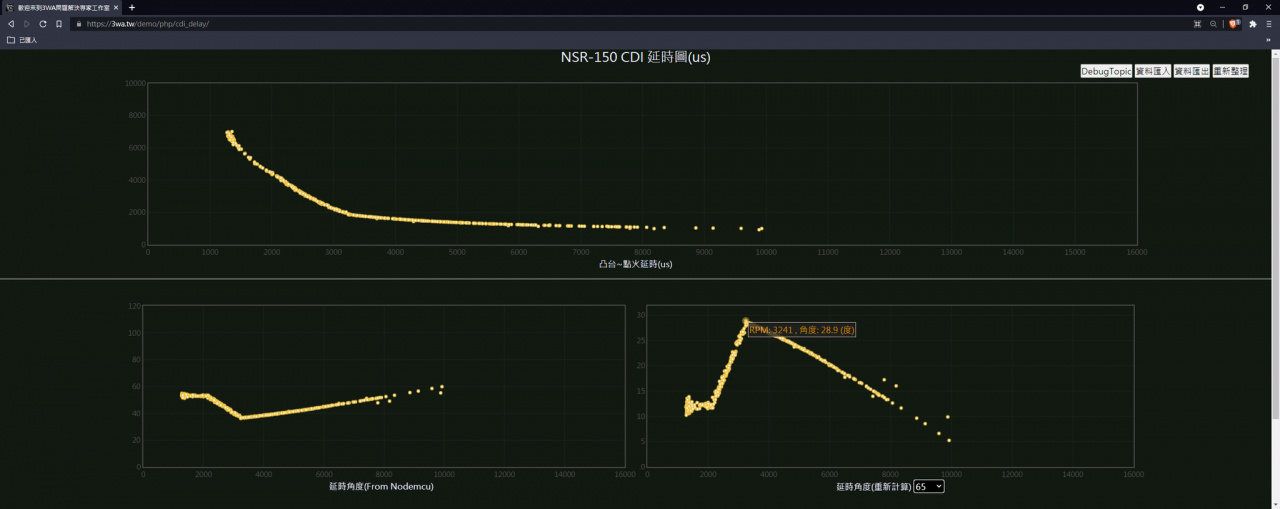
只需把 【當前RPM, (發生點火時間-凸台觸發時間),(發生點火時間-凸台觸發時間) / rpm 一圈時間】
利用 mqtt 推播到伺服器,即可在網頁上訂閱 topic 把數值畫到圖表
原廠 CDI 抓的時間匯出的 Json 如下:https://sunnyriver.3wa.tw/demo/htm/beautiful_json/?id=79
可以自行在:https://sunnyriver.3wa.tw/demo/php/cdi_delay/ 匯入看看
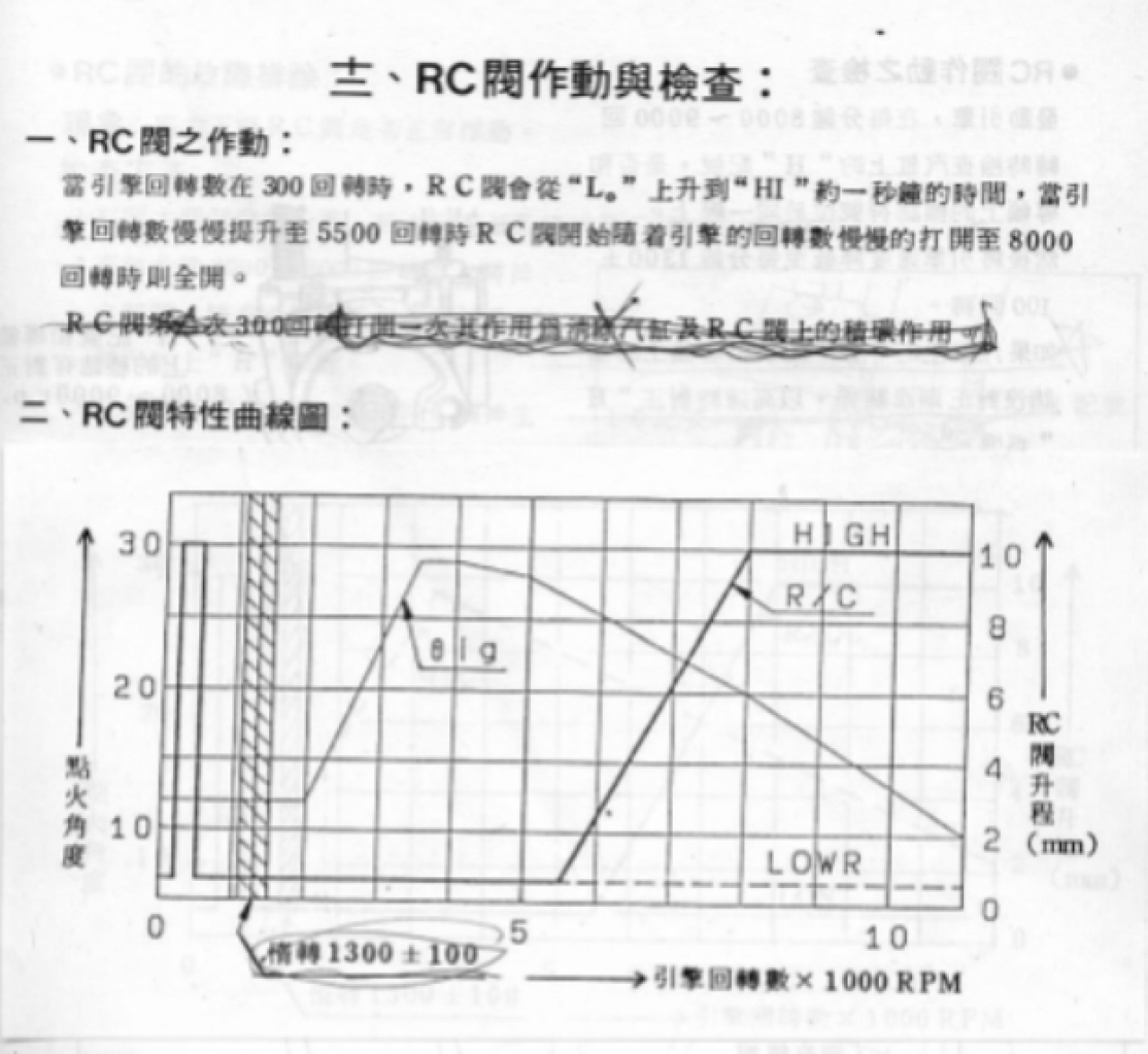
右下角的65延時角度重新計算,是指用 65-當前的角度,得出來的值就很接近 NSR 手冊畫的數值
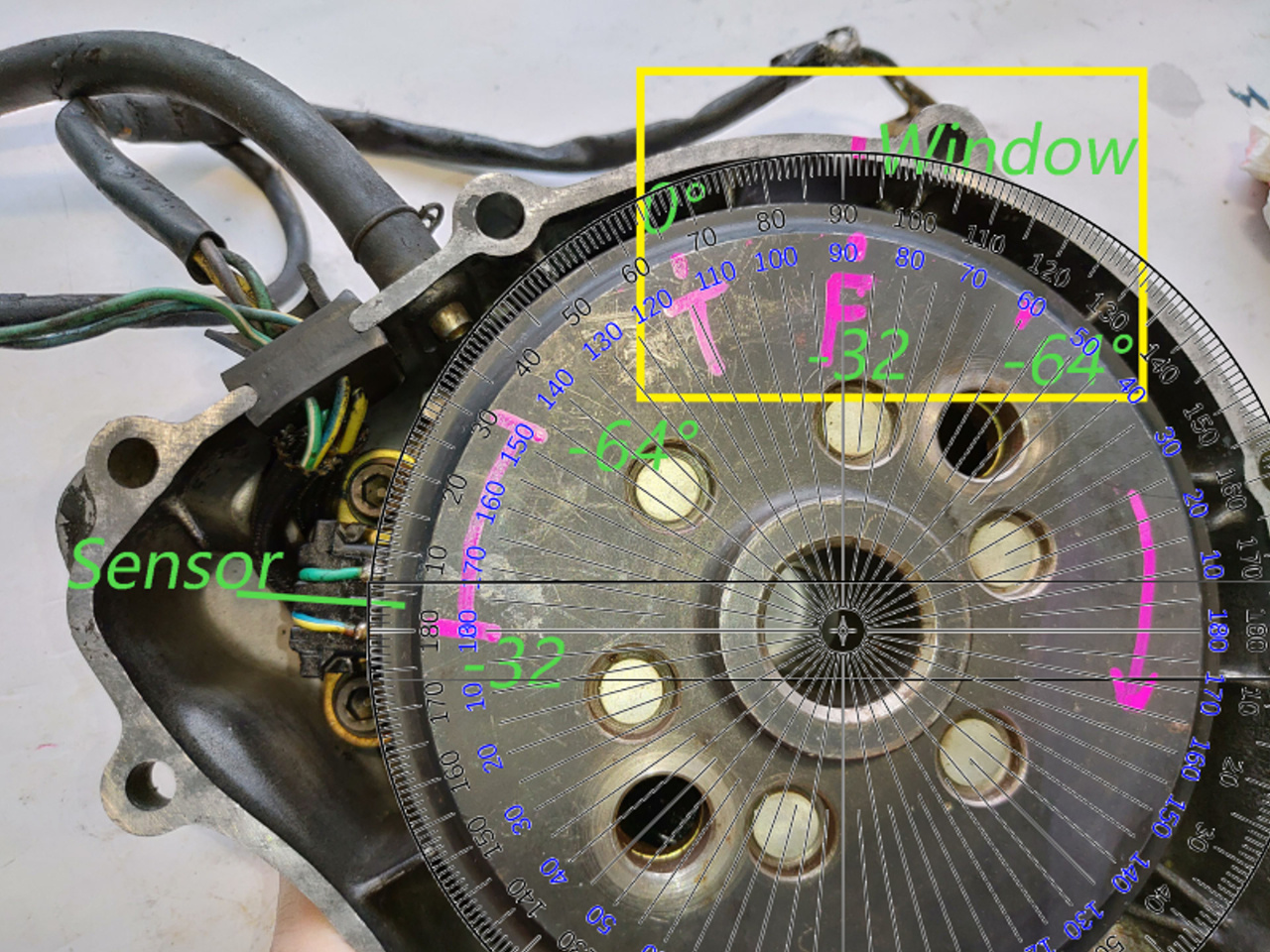
感謝田老師分享 NSR 轉子、拾波器位置,我把量角器參考值放上
(老實說羽山不是汽修科,看這個角度也是看到腦袋打結…)
最終我的想法就很單純,拾波器抓到,然後發生點火,這段時間,相對的轉速是多少
那麼可程式 CDI 也照這個時間來點火,應該就不會差太多吧...^^"

拿出原廠 CDI

製作公母接頭,把要偵測的 凸台訊號、點火 外拉出來

好了~
同學也可以把「紅/白」要給 RC 電腦的線拉出來,之後方便觀察

接到車上發動,每個轉速都催幾下
每 0.1 秒 推播 mqtt 把當下的
【當前RPM, (發生點火時間-凸台觸發時間), (發生點火時間-凸台觸發時間) / rpm 一圈時間】
推送到 mqtt ,如:
1327,6824,54.34
4079,1579,38.65
9140,1029,56.44
網頁在接收時,最好也要判斷,同一個轉速時間,只註冊1~3筆抓較新的就好,如果資料無限制一直灌入,網頁也會動彈不得
訊號抓取器詳細的電路圖可以參考:NSR-150 自製可程式 CDI - Part1 (序)
2、如何在不裝上車拉轉時,直接抓 CDI 的點火提前腳是多少

直接在車上拉轉測 CDI 感覺就不是那麼優雅,還要浪費一堆汽油
引擎的生命也隨拉轉一敗快速減少 Q_Q
如果我們可以餵訊號給 CDI,讓 CDI 自己告訴我們它的時序圖
真是一件美好的事情
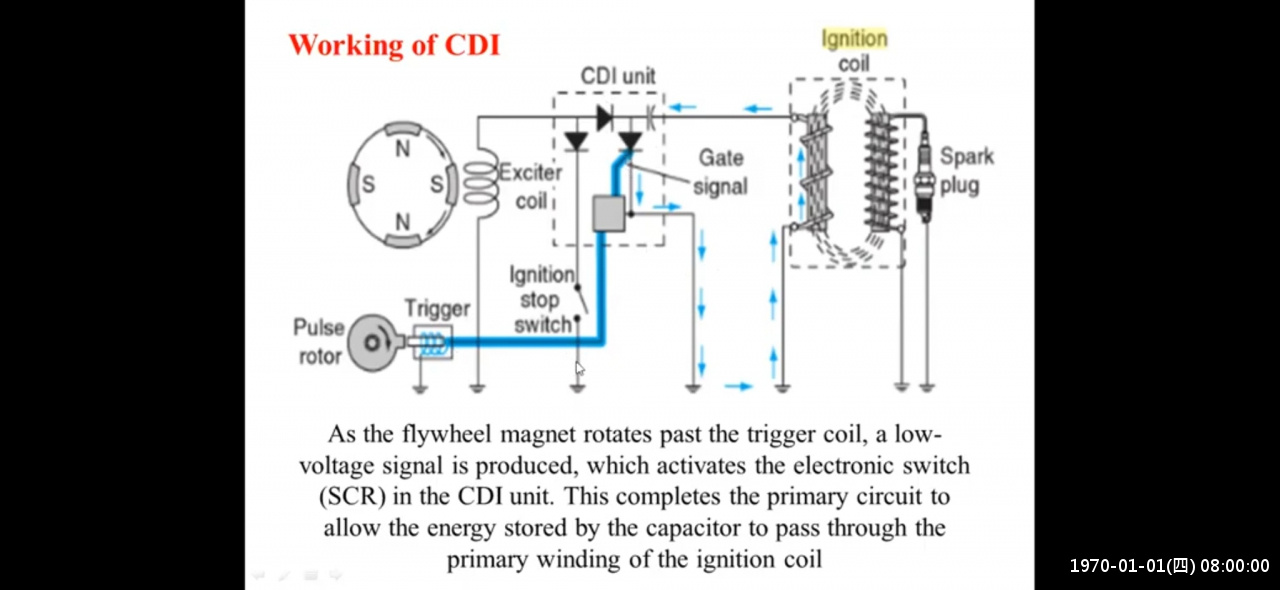
能讓 CDI 開心工作有二個主要條件:
1、讓CDI的電容充電 (激磁交流電餵入)
2、讓CDI以為自己該點火了 (偵測到凸台發生,知道現在轉速多少)
然後呢? 然後 CDI 就放電了

所以需要轉速訊號產生器

同學們可以參考羽山以前寫的 555 轉速訊號產生器的電路圖
亦可以用 Nodemcu 製作,用 Nodemcu 作比較快,作顆直流輸出應該就可以了

製作激磁電壓產生器

要記得裝散熱片,供給的電壓也不要過高,以免 CDI 爆掉...
詳全文:NSR150 在桌上測 CDI 點火時間差
3、如何讓火星塞點火的模擬測試練習
4、如何觸發開閉 SCR 讓電容放電給高壓線圈點火
5、SCR的電容要放電多久才算火星塞點火完成
之前在看Youtube時,無意間找到一個影片是一個教授在上 CDI 的課程
影片可能在某個連結中,忘了記下來
https://www.youtube.com/results?search_query=cdi+scr+during+time
文中提到火星塞點火的時間約為 50 ~ 80㎲
然後在低轉速時,為了解決燃燒問題,應該連續多次放電讓火星塞點火
然後在這個網站參考程式碼
http://www.sportdevices.com/ignition/ignition.htm
http://www.sportdevices.com/ignition/ignition.c
#define scr_pulse 200 //scr spark time, microseconds
程式碼定義的點火時間為 200us
羽山測試後,如果只點 50~80us,也是能運作,但引擎的爆發力就是沒有 200us 那麼飽滿
在低轉時,如果只點 50~80us 一次,稍微有點難以維持怠速
(也可能是當時二極體用了1N4007電流太小)
在 14000rpm 時,曲軸一圈的時間約 4285us
點火點個 200us 應該也是 ok 嗎 ?
6、點火提前角為何,何需點火提前角,延後又會如何
7、努力去除凸台抓到訊號的雜訊
抓凸台訊號,也就是每一圈轉速抓的時間都要非常精準
所以一定要先實作一個可以濾掉各種雜訊的轉速表
NSR 催起來真是爽~
詳全文:自製 RPM 轉速表 - Part2
8、使用的材料與影響,電容的容值、耐壓值、二極體的電壓、電流值
9、Arduino Nodemcu 程式開發,ISR 中斷偵測(凸台)與觸發 SCR 時機
10、如何送訊號讓 RC 作動,RC是吃什麼樣的訊號才能觸發電腦轉動伺服馬達

測量接入RC電腦的「紅/白」線,發現訊號值約是 AC 2~3V,隨轉速變高,數值略為上升

之前的 FZR 555 轉速表測試機,輸入端的電源重新製作夾具

2.1 直柄短頭,中心是正極,四週是負極

焊線

重新作線組

測試

裝上車,12V、GND 接電瓶,然後訊號輸出(交流約3V的白線PWM)
接到 RC 電腦,餵入轉速訊號,如 0 ~233 HZ ( 0~14000rpm)

測看看

調整轉速,觀察 RC 變化
找時間要來把調整螺絲上點銹轉漆,整支生銹有點嚴重^^"
看來就是這個訊號沒錯了~

夾的是右邊,接到 RC 電腦的「紅/白」線
已知交流 DC、AC PWM 皆可以正常運作

嘗試用簡易版的轉速訊號產生器測試 RC 電腦
看來 DC PWM 也是可以順利驅動 RC 電腦
近照~忘了拍轉慢一點觀察 5500~7000 RC 慢慢轉看的樣子,有空再弄
不過知道 DC 5V PWM 可以順利驅動,那電路就簡單了
簡易版 DC PWM 詳全文:RPM 訊號產生器 Nodemcu 版
11、如何運用激磁線圈的高壓電轉成 Nodemcu 可以運作的 5V 電壓,可以省一條 12V 正電線

激磁線圈的高壓電線,是在2P線上的「紅/黑」線,將2P線也作一條對接線
將「紅/黑」線獨立拉出來量交流電壓
經實測後,怠速運轉時的平均電壓是 AC 66V 左右,數值會隨轉速拉轉補充進電容消耗變少
12、凸台是正緣觸發,還是負緣觸發,差別多少
13、NSR-CDI 實作練習

將先前測試的電路重新整理,把接線弄清楚明白

再次裝上車測試
接上車踩發發動,冷車怠速就超穩定,心理覺得很開心
接下來要焊成板子,裝上車騎看看嘍~~~
詳全文:https://sunnyriver.3wa.tw/blog/blog.php?id=1930
14、讓二期RC 電腦有一期RC 電腦的騎乘感受(V0.4)

這禮拜又作了一塊新的 CDI,這次輸出給 RC 電腦的訊號,從 D4 提供
V0.4 版的 NSR-CDI 主要三個工項:
1、驗證便宜的 SCR BT151-500R (500V 12A) 能不能取代貴鬆鬆的 SCR SG25AA60 (600V 25A)
2、讓二期的 RC 電腦也能有一期電腦的騎乘感受
3、開機時,自動開閉一次 RC 電腦 (伺服馬達)
電門打開後開機,就可以送訊號讓伺服馬達全開一次
催油門時,也不會在2千轉左右開閉一次
當訊號高於 5000rpm 以上,才是收到什麼訊號,然後送出什麼給 RC 電腦
這樣就可以作到二期電腦有一期電腦的騎乘感受
詳全文:https://sunnyriver.3wa.tw/blog/blog.php?id=1931
這次的製作採手把手一步一步分享怎麼焊接一塊 CDI,零件也很容易取得
喜歡 DIY 的同學可以嘗試看看^^
15、二次側的電容電壓,耐壓 400V 足夠嗎?
田老師請我量看看二次側的電壓,說這側的電壓其實相當高,隨轉速高還會更高
經確認後,在怠速時即有 400V,隨油門催還可以上到700V以上
不知道這裡的電容在這樣高電壓的摧殘下能否勘用
0.68㎌~1.5㎌ 常見的耐壓在 250V ~ 630V
破千的就沒有這麼高的電容值,有可能也很大顆
若半波電壓即可穩定運作,那是否全波倍壓電路是必須呢?
有空要驗證半波電路下,電容實際工作電壓,與運作是亦能正常^^
不然就要增加突波限制電路






























